

▲写真:鉄道総研 R291系「燃料電池ハイブリッド試験電車」 編集部撮影 鉄道総研 国立研究所にて 2019-10-24(取材協力:鉄道総研)
公益財団法人鉄道総合技術研究所(鉄道総研)は,列車自らが車上に集約した運行に関わる情報にもとづき,進路上の安全を判断し,踏切などを制御しつつ安全かつ柔軟な運行を実現する「自律型列車運行制御システム」を開発したと発表した.
地上の信号設備によらず,車上のみで列車停止から運転再開判断までの自動化は世界初の技術となる.
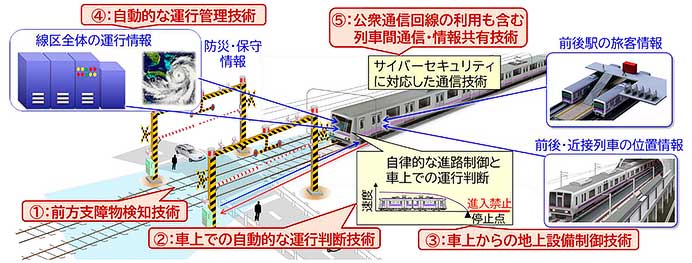
▲図1:自律型列車運行制御システムを構成する5つの要素技術
本システムを構築するため,カメラやLiDAR(Light Detection and Ranging)センサによる線路内や沿線の「前方支障物検知技術」,線路内・沿線の状態や車両の状態などを集約する情報基盤である鉄道ダイナミックマップと,鉄道ダイナミックマップ上の情報にもとづいて「車上で自動的に運行判断をする技術」,無線通信により「車上から地上の転てつ機や踏切を直接制御する技術」,ダイヤ乱れ時の遅延波及防止・早期遅延回復などの運転整理や省エネルギー運転のための広域での「運行管理を自動的に行なう技術」,公衆通信回線の利用やサイバーセキュリティも考慮した「列車間通信・情報共有技術」の計5つの要素技術を開発した(図1).
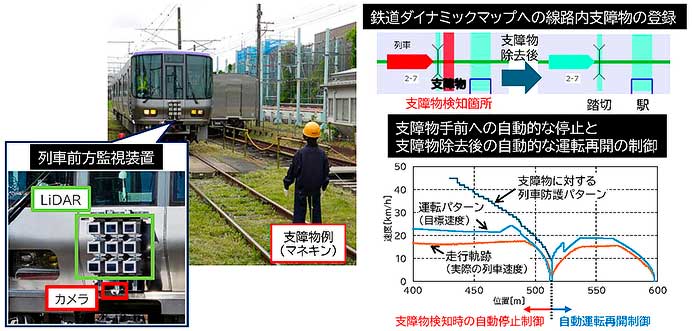
▲図2:列車前方の支障物検知による自動的な停止と自動的な運転再開の例
上記の要素技術を適用した本システムのプロトタイプの実証試験を鉄道総研所内試験線で実施した.試験を通じて,設定した運転パターンに従って地上の転てつ機や踏切を制御しながら自動走行できること,列車前方監視装置が検知した線路内支障物の情報が,車上の鉄道ダイナミックマップに登録され,その情報をもとに車上で列車の停止の要否を判断し,要の場合は支障物手前に停止できること,線路内支障物除去後には車上で自動的に運転再開可否を決定し,可の場合は自動走行を開始することなどの機能確認を実施した(図2).
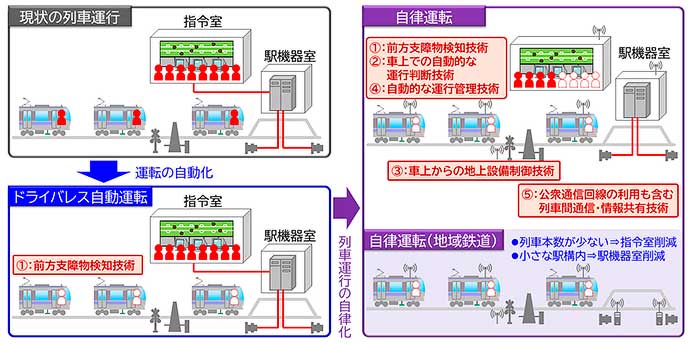
▲図3:自律運転での省人化・省力化イメージ(現状の列車運行やドライバレス自動運転との比較)
本システムでの自律運転により,車上での自動的な運行判断や自動的な運行管理が可能となるため,運転業務のみならず指令など運行管理業務を含めた省人化を図ることができる.また,列車本数が少なく,駅の配線が単純で規模が小さな地域鉄道では,機器室などの削減も可能となる.
なお,要素技術のひとつである前方支障物検知技術は,自律運転だけではなく,踏切のある一般的な路線でのドライバレス自動運転を進めるための技術としても活用できる.さらに,鉄道ダイナミックマップを活用した情報共有ならびに運行判断の自動化技術,あるいは運行管理の自動化技術は,現在の運行管理業務の省力化に活用することもできる(図3).
一部画像は公益財団法人鉄道総合技術研究所ニュースリリースから